MiddleROV

Перед использованием
Предосторожности и рекомендации
Посторонние частицы могут прилипать к внутренней стороне крышек (вокруг резинового уплотнения) при открытии или закрытии крышек в местах с большим количеством песка, пыли и др. Результатом этого может стать нарушение водонепроницаемых свойств при закрытии крышек с прилипшими посторонними частицами.
В случае если на внутреннюю сторону крышки или разъёма попадут инородные частицы, удалите их сухой безворсовой тканью.
Если на изделии, или внутренней стороне крышки появятся, например, капли воды, сотрите их мягкой сухой тканью. Не открывайте и не закрывайте крышки вблизи воды, под водой, мокрыми руками, или, когда само устройство влажное. Это может привести к попаданию воды внутрь герметичных блоков.
Избегайте сильных ударов или вибраций, не роняйте изделие и его части, не стучите по нему. Не погружайте изделие на глубину свыше 10 м.
Требования к условиям эксплуатации
При условии соблюдения требований по уходу и техническому обслуживанию, перечисленных в данном документе, данный набор может работать под водой на глубине, не превышающей 10 м.
Это не гарантирует отсутствие повреждений, неисправностей или водонепроницаемость при любых условиях.
Водонепроницаемость не гарантируется, если изделие подвергнется ударному воздействию в результате удара, падения и т. д. Если изделие было подвержено ударному воздействию, следует обратиться за его проверкой (за дополнительную плату) в компанию ООО «Центр робототехники», чтобы убедиться в сохранении его водонепроницаемости.
Если на изделие попадет моющее средство, мыло, брызги из горячего источника, добавка для ванн, масло для загара, солнцезащитное средство, химические вещества и т. д., немедленно вытрите изделие.
Функция водонепроницаемости изделия действует только в отношении пресной и морской воды.
На любые неисправности, вызванные неправильным использованием или несоблюдением правил эксплуатации изделия покупателем, гарантия распространяться не будет.
Не оставляйте изделие на длительное время в местах с очень низкой температурой (например, на лыжных курортах или на большой высоте) или в местах, где температура может превысить 40°C (например, под яркими солнечными лучами внутри автомобиля, рядом с нагревательными приборами, на катере или пляже и т. д.), водонепроницаемость изделия может ухудшиться.
Эксплуатация устройства под водой
Используйте изделие под водой на глубине до 10 м при температуре воды от 4 °C до +40 °C.
Не используйте изделие на глубине свыше 10 м.
Не используйте изделие в горячей воде с температурой выше 40 °C (в ванной или горячем источнике).
Не открывайте и не закрывайте крышки под водой.
Не подвергайте изделие ударам под водой (характеристика водонепроницаемости может не сохраниться, и в изделие попадет вода).
Общие сведения
Набор для сборки телеуправляемого необитаемого подводного аппарата MiddleROV (Рис.1) предназначен для познавательных и демонстрационных целей. Данный набор может заинтересовать детей возраста 11-15 лет, но не является игрушкой в соответствии с ТР ТС 008/2011 (п. 2 ст. 1, п. 4 Прил. 1), а инвентарем для участия в технологических соревнованиях.
Набор разработан и изготовлен ООО «Центр робототехники» г. Владивосток и декларируется в реестре Росаккредитации ЕАЭС No RU Д-RU.НА21.В.03490 как Модели электронные, для лиц старше четырнадцати лет.
Сборка и запуски модели телеуправляемого подводного аппарата допускается под присмотром родителей либо взрослых наставников, осуществляющих свое наставничество на законных основаниях. Запуски в бассейнах и рекреационных зонах должны проводиться строго в соответствии с правилами безопасности, там установленными.

Назначение и область применения
Набор MiddleROV предназначен для сборки подводного робота. Подводный аппарат, собранный из компонентов набора предназначен для демонстрационных и образовательных целей. Подобно изделиям, применяемым в океанографии и освоении шельфа, ТНПА MiddleROV с помощью собственных движителей может передвигаться в водной среде нужным образом, производя видеосъемку подводных объектов и участков дна, и передавать видеопоток на пульт оператора.
Middle ROV помимо движителей имеет захват, приводимый в действие сервоприводом, с помощью захвата можно выполнять манипуляции под водой.
Состав конструктора
Таблица 1. Состав аппаратной части
| № | Наименование элемента | Описание элемента | Кол-во |
|---|---|---|---|
| . | Модуль бортовой электроники | Iskra Neo с платой MiddleROV Shield в герметичном корпусе | 1 |
| . | Движитель подводный | Движитель с кабелем и разъемом | 3 |
| . | Захват подводный | Захват, приводимый в движение сервоприводом | 1 |
| . | Камера подводная поворотная | Аналоговая видеокамера, в герметичном корпусе с сервоприводом | 1 |
| . | Пульт управления | Блок питания, преобразующий 220 В 50 Гц в 12 В постоянного тока, экран для отображения видеопотока, предохранители, адаптер для беспроводного пульта управления в жестком кейсе. | 1 |
| . | Материал для изготовления рамы | Листовой полиэтилен толщиной 8 мм | 1 |
| . | Материал для изготовления плавучести | Экструдированный полистирол толщиной 30 мм | 1 |
| . | Комплект крепежа | Винты, гайки | 1 |
| . | Упаковка | Картонная коробка | 1 |
| . | Комплект эксплуатационной документации | Паспорт, Руководство по эксплуатации | 1 |
| . | Комплект для изготовления кабель-троса | Кабель для подачи питания, управления и передачи видеосигнала | 1 |
| . | Комплект для герметизации пенетратора | Эпоксидный двухкомпонентный герметик | 1 |
| . | Смазка силиконовая | Смазка для нанесения на резиновые уплотнительные кольца | 1 |
| . | Джойстик | Беспроводной джойстик для управления аппаратом | 1 |
| . | Пенетратор | Предназначен для ввода кабель-троса в модуль бортовой электроники | 1 |
Указания по сборке аппарата
Монтаж электроники
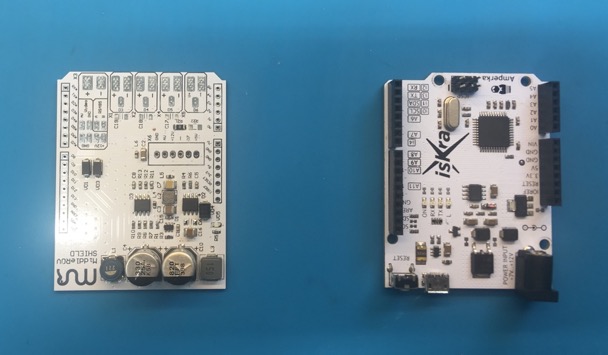
На рис. 2. приведены платы, которые устанавливаются в герметичный блок модуль бортовой электроники.
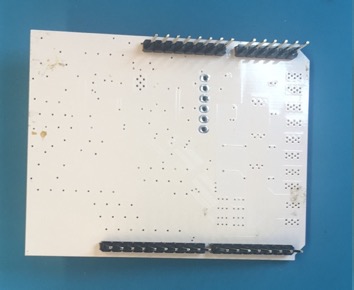
Первым делом необходимо припаять штыревые контакты к MiddleROV Shield, как указано на рис. 3.
Далее необходимо припаять провода движителей и захвата, как на рис. 4. следующим образом:
- Подключение движителей (все подключения осуществляется к
контактным площадкам области «X1, X2, X4» для каждого движителя
соответственно):
- «+» – красный провод движителя,
- «–» – черный провод движителя,
- «D3...D5» – желтый провод движителя.
- Подключение манипулятора-захвата (все подключения осуществляется
к контактным площадкам области «X5»):
- «+» – красный провод сервомотора,
- «–» – черный провод сервомотора,
- «D6» – желтый провод сервомотора.

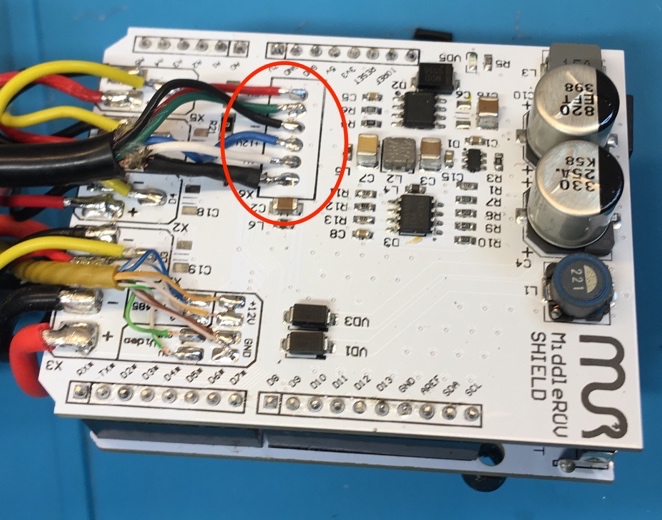
Далее необходимо припаять провода составного кабель-троса, как на рис. 5. следующим образом (припаивать к контактным площадкам области «X3»):
Подключение силовой части кабель-троса:
- «+» – красный провод;
- «-» – черный провод.
Подключение сигнальной части:
- Провода интерфейса RS-485 паяются к контактным площадкам:
- «A» – Бело-синий провод;
- «B» – Синий провод.
- Провода видео сигнала паяются к контактным площадкам:
- «AV» – Бело-зеленый;
- «GND» – Зеленый;
- «+12V» – Оранжевый и бело-оранжевый
- «GND» – Коричневый и бело-коричневый.
- Провода интерфейса RS-485 паяются к контактным площадкам:

Далее необходимо припаять провода поворотной камеры, как на рис. 6. следующим образом (все подключения осуществляется к контактным площадкам области «X6»):
- «+5V» – красный провод сервомотора поворотной камеры,
- «D7» – зеленый провод сервомотора поворотной камеры,
- «-» – черный провод сервомотора поворотной камеры,
- «+12V» – синий провод поворотной камеры,
- «AV» – белый провод поворотной камеры,
- «GND» – экран кабеля поворотной камеры.
Далее необходимо собрать шасси, как на рис. 7. Данное действие можно выполнить перед началом пайки.

Далее необходимо припаять составной кабель-трос к разъему.
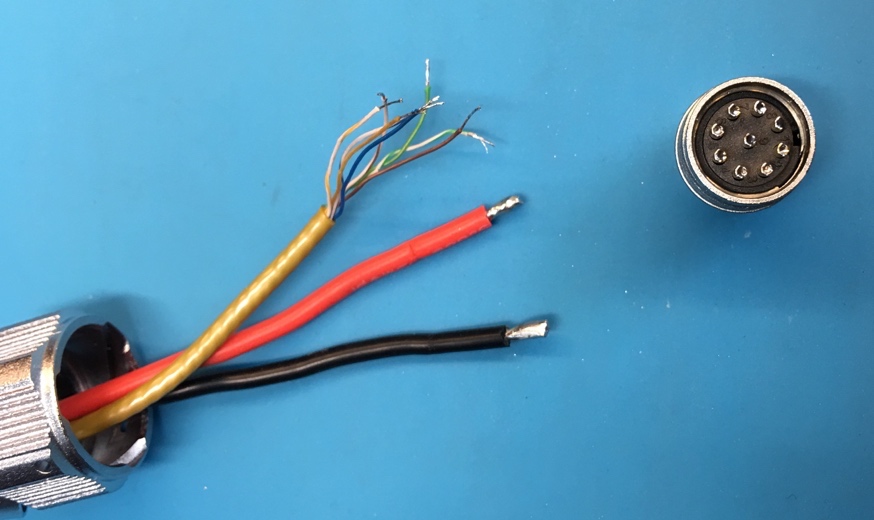
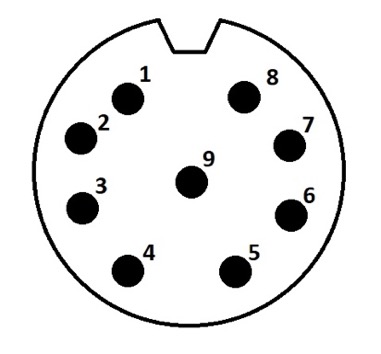
Схема подключения проводов составного кабель-троса к разъему представлена на рис. 9.
- «1, 8» – красный силовой провод, оранжевый и бело-оранжевый;
- «4, 5» – черный силовой провод, коричневый и бело-коричневый;
- «2» – зеленый провод;
- «3» – бело-зеленый провод;
- «6» – бело-синий провод;
- «7» – синий провод.
Сборка элементов конструкции
Все кабели от подводных устройств (движители, захват, поворотная камера) входят в модуль бортовой электроники через специальные гермовводы (Рис. 10). Перед погружением аппарата под воду, убедитесь, что все гермовводы полностью затянуты с помощью специального приспособления (Рис. 11)


Составной кабель-трос необходимо продеть в пенетратор и залить герметиком. Далее приведена инструкция по заливке пенетратора для одиночного кабеля (Рис. 11-13). Для составного кабель-троса инструкция аналогичная кроме того, что необходимо подготовить к заливке несколько проводов.


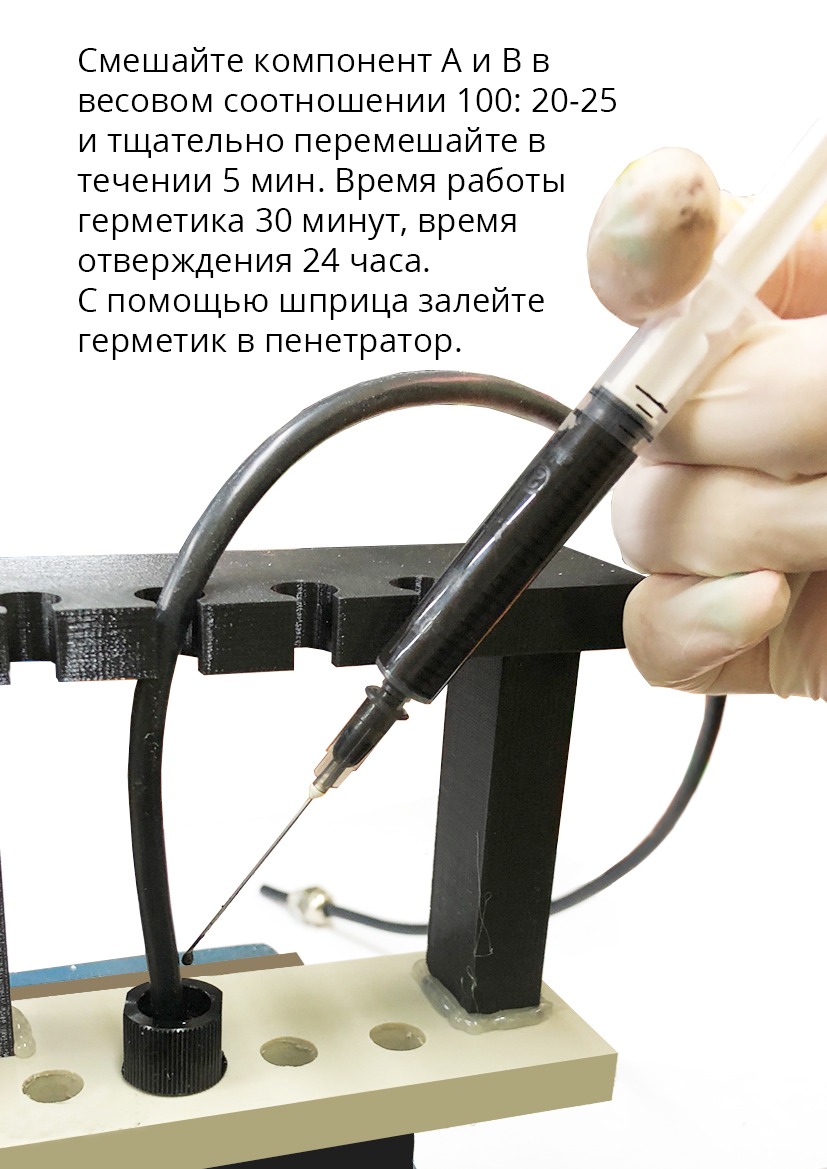
Заливка и застывание должны проходить при температуре выше 20°С. Если температура в помещении будет ниже, то герметик может не застыть.
Для изготовления рамы используйте листовой полиэтилен, который идет в наборе. Для изготовления элементов плавучести используйтеэкструдированный полистирол. Вы можете самостоятельно разработать конструкцию аппарата, а можете воспользоваться готовыми чертежами рамы и плавучести, которые выложены в открытый доступ здесь: https://github.com/murproject/MiddleROV
Указания по прошивке аппарата
Пульт управления
- Скачайте прошивку для пульта управления здесь: https://github.com/murproject/MiddleROV2Surface
- Пройдите в папку MiddleROV2Surface и найдите в ней файл MiddleROV2Surface.ino
- Откройте его с помощью Arduino IDE. Ссылка на скачивание Arduino IDE: https://www.arduino.cc/en/Main/Software
- Соедините ваш ПК с Arduino Mega в пульт управления с помощью USB type B и нажмите на кнопку “Загрузка”.
- Проверьте что при подключенном джойстике в сериал порт пишется отладочная информация.
- Если отладочная информация поступает и она соответствует вашим нажатиям на джойстике, то приятного пользования.
- Обо всех проблемах пишите на GitHub в “Issues”
Блок бортовой электроники
- Скачайте прошивку для платы Arduino Амперка Искра здесь: https://github.com/murproject/MiddleRov2OnBoard
- Пройдите в папку MiddleROV2OnBoard и найдите в ней файл MiddleROV2OnBoard.ino
- Откройте его с помощью Arduino IDE. Ссылка на скачивание Arduino IDE: https://www.arduino.cc/en/Main/Software
- Соедините ваш ПК с Iskra Neo в модуле бортовой электроники с помощью USB type B и нажмите на кнопку “Загрузка”.
- Проверьте что при подключенном джойстике в сериал порт пишется отладочная информация.
- Обо всех проблемах пишите на GitHub в “Issues”
Проверка работоспособности
Проверка на воздухе
- Убедиться, что при пайке не произошло короткого замыкания.
- Подключить кабель-трос к разъёму на пульте управления.
- Вставить передатчик джойстика в разъём на пульт управления.
- Включить кабель с вилкой С13 в пульт управления и в сеть 220 В, 50 Гц.
- Включить питание на пульт управления клавишей. На мониторе должно появится изображение с камеры.
- Включить джойстик (проверить наличие и заряд батареек в джойстике). При нажатии на рычаги джойстика должны работать движители, сервопривод захвата и сервопривод поворотной камеры.
- Выключить питание.
Проверка в воде
- Убедится, что вводы кабелей в модуль бортовой электроники закручены до конца и что крышка вставлена в модуль через резиновые уплотнительные кольца, а также, что посторонние предметы, пыль и грязь не попали в место соединения крышки с корпусом модуля бортовой электроники.
- Подключить кабель-трос к разъёму на пульт управления.
- Вставить передатчик джойстика в разъём на пульт управления.
- Опустить аппарат в воду.
- Провести балластировку аппарата. После балластировки вытереть руки насухо!
- Включить кабель с вилкой С13 в пульт управления и в сеть 220 В, 50 Гц.
- Включить питание на пульт управления клавишей. На мониторе должно появится изображение с камеры.
- Включить джойстик (проверить наличие и заряд батареек в джойстике). При нажатии на рычаги джойстика аппарат должен перемещаться в воде, захват должен работать, камера должна поворачиваться внутри герметичного корпуса.
- Отключить питание и выдернуть кабель из розетки 220 В.
- Достать аппарат из воды, дать возможность воде стечь, протереть аппарат сухими салфетками. Если аппарат использовался в морской воде, то необходимо его помыть в пресной воде, затем вытереть насухо.
Особенности применения
MiddleROV является набором, позволяющим создать законченное устройство. Перед погружением под воду необходимо убедиться, что внутри герметичных корпусов отсутствует влага, мусор, либо следы коррозии. Вскрывать герметичные корпуса можно только при отсутствии влаги на любых частях аппарата. Необходимо также проверять изоляцию кабеля, по которому подаётся питание устройству, т.к. нарушение изоляции может являться причиной выхода устройства из строя.
Не подвергайте устройство ударному воздействию, т.к. это может нарушить герметичность модулей электроники и привести к выходу устройства из строя.
Балластировка
Для корректной работы движительно-рулевой системы необходимо выполнить мероприятия по балластировке и обеспечению остойчивости (достижению около нулевой плавучести и около нулевого крена и дифферента).
В комплект поставки входит материал с низкой плотностью (экструдированный полистирол), из него предлагается изготавливать поплавки, которые рекомендуется разместить в верхней части аппарата и закрепить пластиковыми крепёжными винтами М6. Необходимо добиться того, чтобы аппарат держался на поверхности воды, при этом, если его слегка толкнуть рукой вглубь воды, то он должен медленно начать опускаться под воду, затем медленно начать подниматься. Желательно добиться такой плавучести, чтобы аппарат при отключении питания медленно всплыл на поверхность,не ушёл на дно.
Используя болты М6 и работая с размещением поплавков, движителей, камеры, захвата и модуля бортовой электроники, необходимо устранить как крен, так и дифферент аппарата (отклонение по бокам и по направлению носкорма). Если балластировка и обеспечение остойчивости выполнены хорошо, то аппарат в выключенном состоянии слегка будет показываться из-под воды верхними плоскостями поплавков.
Следует соблюдать меры предосторожности при работе с движителями: запрещается трогать руками лопасти гребных винтов движителей при подключенном питании. Лопасти изготавливаются из ABS пластика, имеют заострённые края и могут вращаться со скоростью до 3000 оборотов в минуту, что может привести к травмам. Запрещается также продевать кабель через лопасти движителей, либо вставлять какие-либо предметы в движители.
Хранение, транспортировка, утилизация
Хранить при температуре от -5 до +45°C
Эксплуатировать при температуре от +4 до + 40°C
Гарантийные обязательства
На компоненты электроники действует ограниченная гарантия сроком 3 месяца с даты подписания товарной накладной. В случае нарушения условий эксплуатации (использование изделия за пределами диапазона указанных температур, погружение на глубину более 10 метров, удары) гарантийные обязательства снимаются.
В случае возникновения гарантийных обязательств покупатель за свой счёт отправляет весь комплект в адрес ООО “Центр робототехники” (Россия, г. Владивосток, ул. Комсомольская, 1, оф. 404). Диагностика и ремонт выполняются в течение 40 рабочих дней. В случае обнаружения нарушений условий эксплуатации происходит письменное уведомление покупателя о невозможности выполнения гарантийного ремонта или замены.